注记
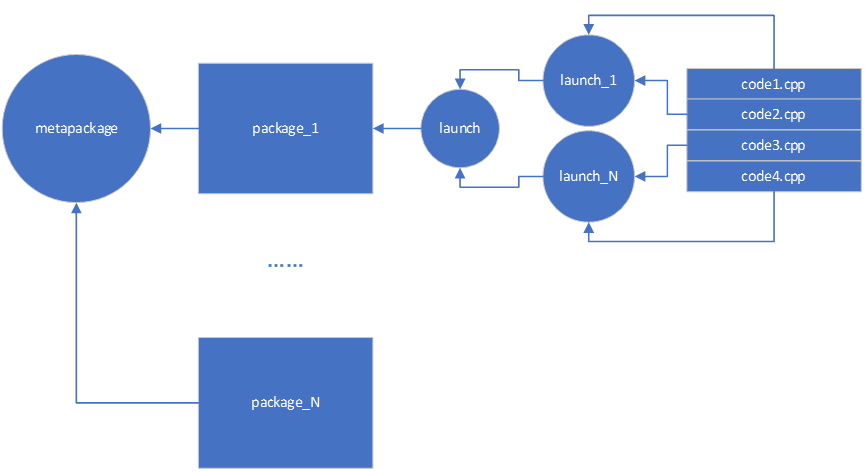
SSD
spi
计算机辅助药物设计
CET-4
jQuery
websocket
java项目实战
心理健康管理系统
批量下载图片的插件
ci/cd
模板方法模式
按钮
光纤光栅
ruby
C51
小世界网络
智能制造
Gerber
windterm
launch
2024/4/11 22:50:42
【ROS】—— ROS运行管理 ——元功能包与launch文件(八)
文章目录前言1. 元功能包1.1 应用场景1.2 概念1.3 实现2. ROS节点运行管理launch文件2.1 launch文件标签之launch2.2 launch文件标签之node2.3 launch文件标签之include2.4 launch文件标签之remap2.5 launch文件标签之param2.6 launch文件标签之rosparam2.7 launch文件标签之gr…

roslaunch格式
The roslaunch package comes with roslaunch tool as well as several support tools to assist in the process of launching ROS Nodes.
目录
roslaunch Launch syntaxPassing in argsNon-launch optionsInternal-use only optionsEnvironment Variables (advanced users)…
ROS | launch文件详解
文章目录 概述一、原理解读1.launch文件总览2.node3.param4.arg5.rosparam6.include7.remap概述 本节详细介绍ROS中的launch文件及其内容。
一、原理解读
1.launch文件总览 launch文件基本都长这样,中间填内容。
<launch>......
</launch></
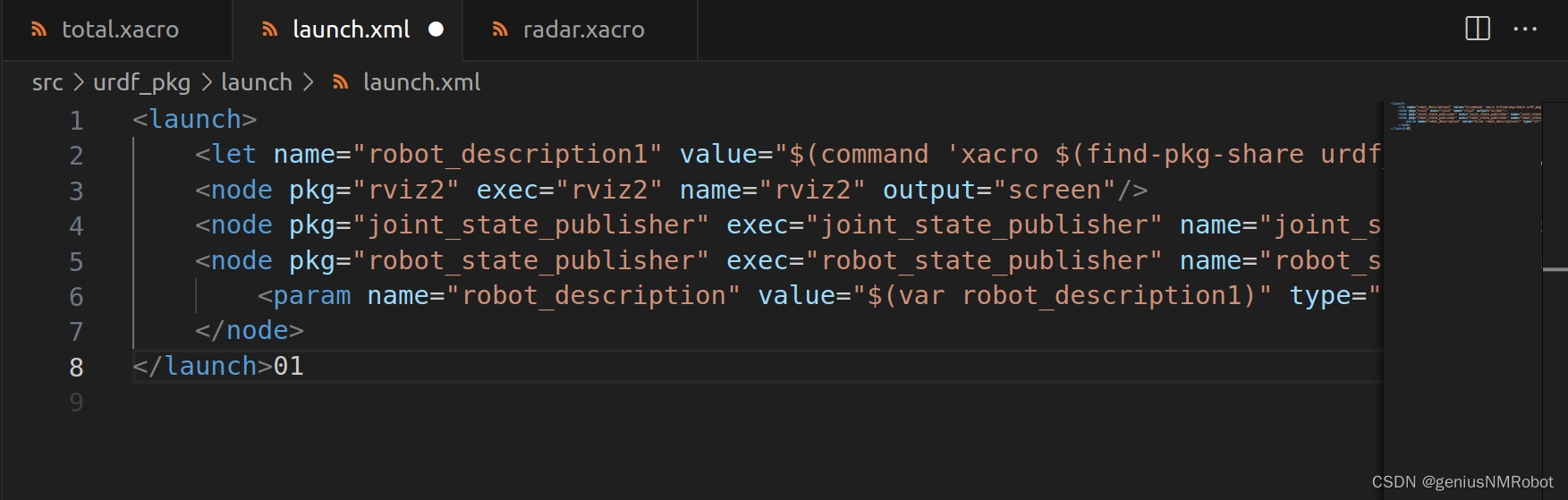
Caught exception in launch(see debug for traceback)
Caught exception in launch (see debug for traceback): Caught exception when trying to load file of format [xml]: Caught exception when trying to load file of format [xml]: junk after document element: line 8, column 9 罪魁祸首: 看吧我在launch文件…
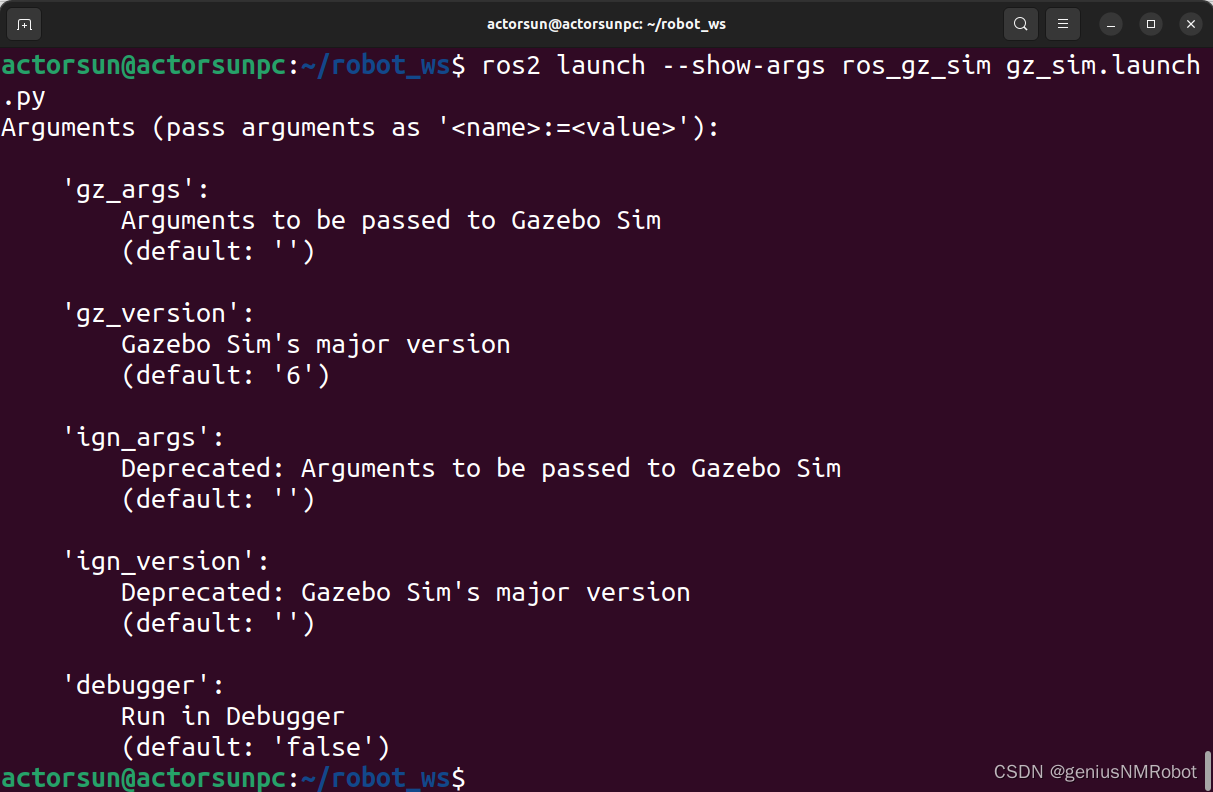
ros2查看launch文件内需要提供的参数(接口):
格式:ros2 launch --show-args 包名称 launch文件名称
例如:
ros2 launch --show-args ros_gz_sim gz_sim.python.py

ROS2高效学习第十章 -- ros2 高级组件之大型项目中的 launch 其二
ros2 高级组件之大型项目中的 launch 1 前言和资料2 正文2.1 启动 turtlesim,生成一个 turtle ,设置背景色2.2 使用 event handler 重写上节的样例2.3 turtle_tf_mimic_rviz_launch 样例 3 总结 1 前言和资料
早在ROS2高效学习第四章 – ros2 topic 编程…
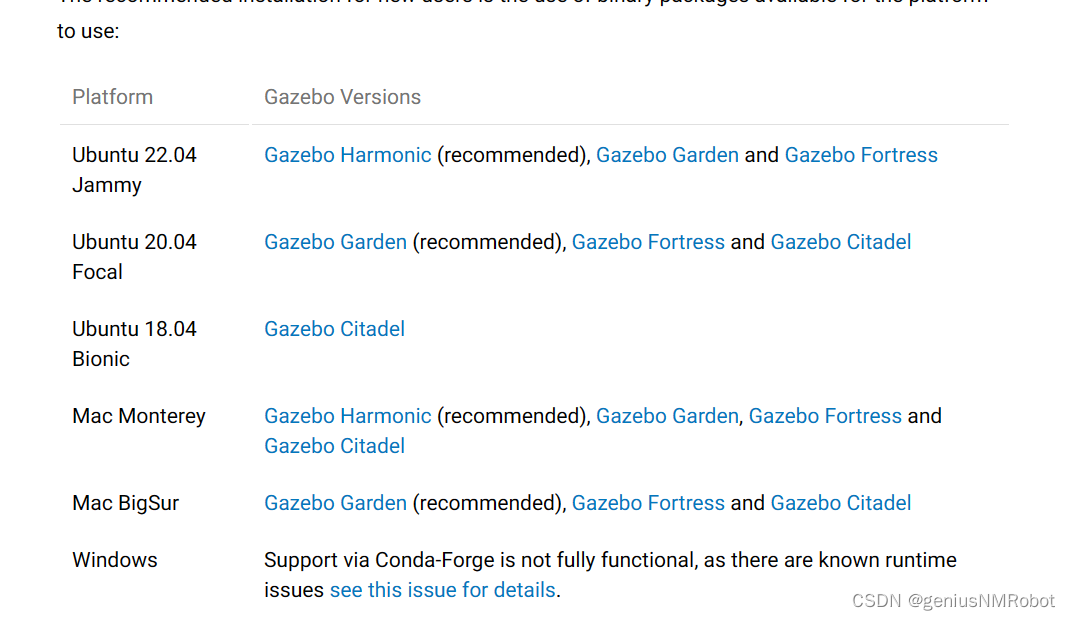
ubuntu22.04+ROS2推荐匹配的gazebo版本
放大以后看到: 可以看到ros2推荐使用版本是humble-----匹配的是Ubuntu22.04LTS -------匹配gazebo Harmonic
UST-10LX使用hector_slam构建地图
简述: 本文讲述的是hokuyo UST-10LX在Ubuntu 14.04.5 ROS Indigo下进行实验,然后通过hector_slam构建地图。 slam(Simultaneous Localization andMapping,同步定位与建图)。 ros 中常用的2d slam 算法主要有 gmapping…
launch文件remap标签
一、remap用于topic的映射
下面是两个launch启动两个节点的例子: 一个节点叫talker,它发布一个topic名为/talker 一个节点叫test1,它订阅一个topic名为/talker_mid
<!--start_talker.launch-->
<launch> <node pkg&quo…
ros2 学习launch文件组织工程 yaml配置文件
简单范例
功能描述
使用launch文件,统一管理工程,实现img转点云,发送到img_pt的topic,然后用reg_pcl节点进行subscribe,进行点云配准处理,输出融合后的点云到map_pt的topic。最后由rviz2进行点云展示。
…

ROS2的安装与使用
安装说明
安装ROS2
$ sudo apt update
$ sudo apt install curl gnupg2 lsb-release
$ curl http://repo.ros2.org/repos.key | sudo apt-key add -
$ sudo sh -c echo "deb http://packages.ros.org/ros2/ubuntu lsb_release -cs main" > /etc/apt/sources.li…
仿真机器人-深度学习CV和激光雷达感知(项目2)day8【作业2与答案2】
文章目录 前言作业2答案2前言 💫你好,我是辰chen,本文旨在准备考研复试或就业 💫本文内容是我为复试准备的第二个项目 💫欢迎大家的关注,我的博客主要关注于考研408以及AIoT的内容 🌟 预置知识:基本Python语法,基本linux命令行使用 以下的几个专栏是本人比较满意的…